😃 Welcome to my personal page!
I am Tianqi Liu (刘天齐 in Chinese), a second-year (2023.09-) master’s student in Artificial Intelligence at Huazhong University of Science and Technology (HUST), supervised by Prof. Zhiguo Cao. Currently, I am fortunate to be a research assistant at MMLAB@NTU, advised by Prof. Ziwei Liu. Before that, I received my bachelor’s degree from HUST in 2023. My current research interests is 3D/4D reconstruction and generation.
🔥 News
- 2025-08 : 🎉🎉 4DNeX is released.
- 2025-06 : 🎉🎉 Free4D and MuGS are accepted to ICCV 2025.
- 2025-02 : 🎉🎉 DoF-Gaussian, WildAvatar, and CH3Depth are accepted to CVPR 2025.
- 2024-07 : 🎉🎉 MVSGaussian and DreamMover are accepted to ECCV 2024.
- 2024-02 : 🎉🎉 GeFu and RStab are accepted to CVPR 2024.
- 2023-07 : 🎉🎉 ET-MVSNet and DMVSNet are accepted to ICCV 2023.
📝 Publications
(* denotes equal contribution.)
[arXiv 2025] 4DNeX: Feed-Forward 4D Generative Modeling Made Easy
Zhaoxi Chen*, Tianqi Liu*, Long Zhuo*, Jiawei Ren, Zeng Tao, He Zhu, Fangzhou Hong, Liang Pan, Ziwei Liu.
[Project page]
[Paper]
[Code]
[Dataset]
[Video]
4DNeX is a feed-forward framework that generates 4D (dynamic 3D) scene representations from a single image by adapting a video diffusion model. It produces high-quality dynamic point clouds and enables novel-view video synthesis.
[ICCV 2025] Free4D: Tuning-free 4D Scene Generation with Spatial-Temporal Consistency
Tianqi Liu*, Zihao Huang*, Zhaoxi Chen, Guangcong Wang, Shoukang Hu, Liao Shen, Huiqiang Sun, Zhiguo Cao, Wei Li, Ziwei Liu.
[Project page]
[Paper]
[Code]
[Video]
Free4D is a tuning-free framework for 4D scene generation from a single image or text.

[ICCV 2025] MuGS: Multi-Baseline Generalizable Gaussian Splatting Reconstruction
Yaopeng Lou, Liao Shen, Tianqi Liu, Jiaqi Li, Zihao Huang, Huiqiang Sun, Zhiguo Cao.
[Paper]
[Code]
MuGS is the first multi-baseline generalizable gaussian splatting method.
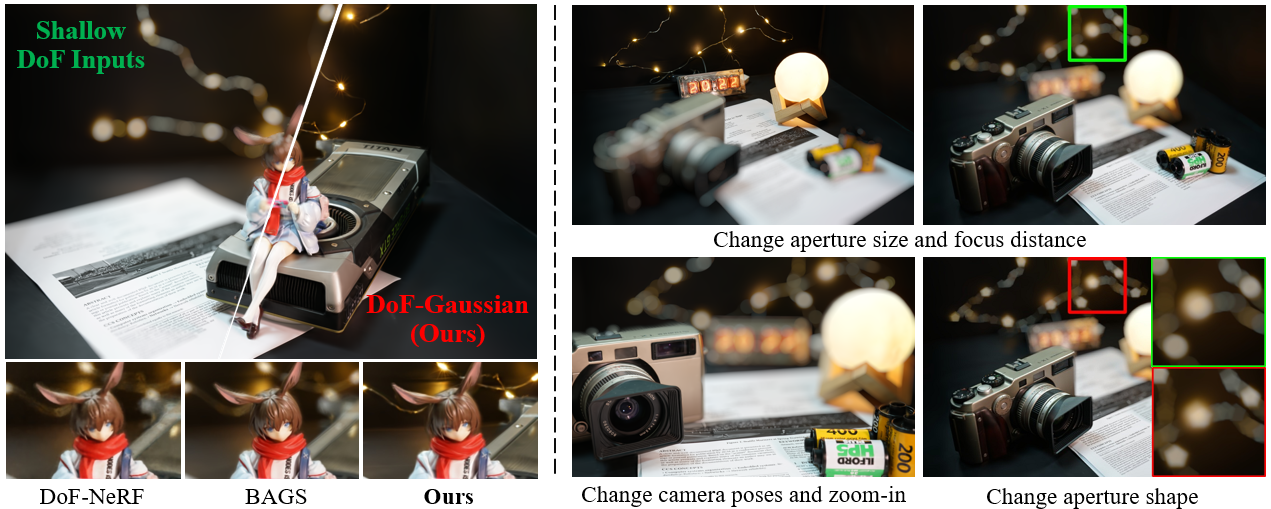
[CVPR 2025] DoF-Gaussian: Controllable Depth-of-Field for 3D Gaussian Splatting
Liao Shen, Tianqi Liu, Huiqiang Sun, Jiaqi Li, Zhiguo Cao, Wei Li, Chen Change Loy.
[Project page]
[Paper]
[Code]
We introduce DoF-Gaussian, a controllable depth-of-field method for 3D-GS. We develop a lens-based imaging model based on geometric optics principles to control DoF effects. Our framework is customizable and supports various interactive applications.
[CVPR 2025] WildAvatar: Learning In-the-wild 3D Avatars from the Web
Zihao Huang, Shoukang Hu, Guangcong Wang, Tianqi Liu, Yuhang Zang, Zhiguo Cao, Wei Li, Ziwei Liu.
[Project page]
[Paper]
[Code]
[Video]
We present WildAvatar, a web-scale in-the-wild video dataset for 3D avatar creation.
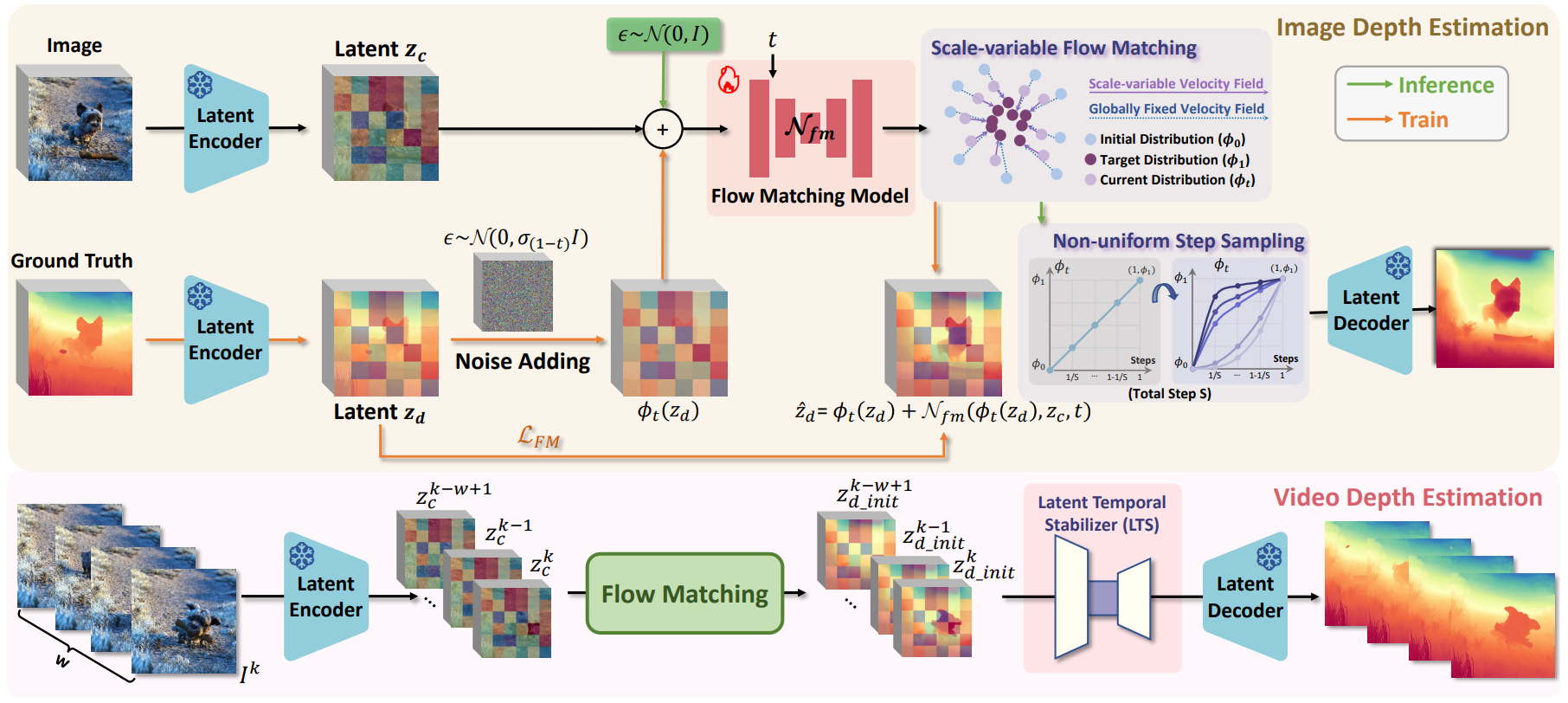
[CVPR 2025 Highlight] CH3Depth: Efficient and Flexible Depth Foundation Model with Flow Matching
Jiaqi Li, Yiran Wang, Jinghong Zheng, Junrui Zhang, Liao Shen, Tianqi Liu, Zhiguo Cao.
[Paper]
[Code]
CH₃Depth is an efficient and flexible flow-matching-based depth estimation framework that achieves state-of-the-art zero-shot performance in accuracy, efficiency, and temporal consistency.
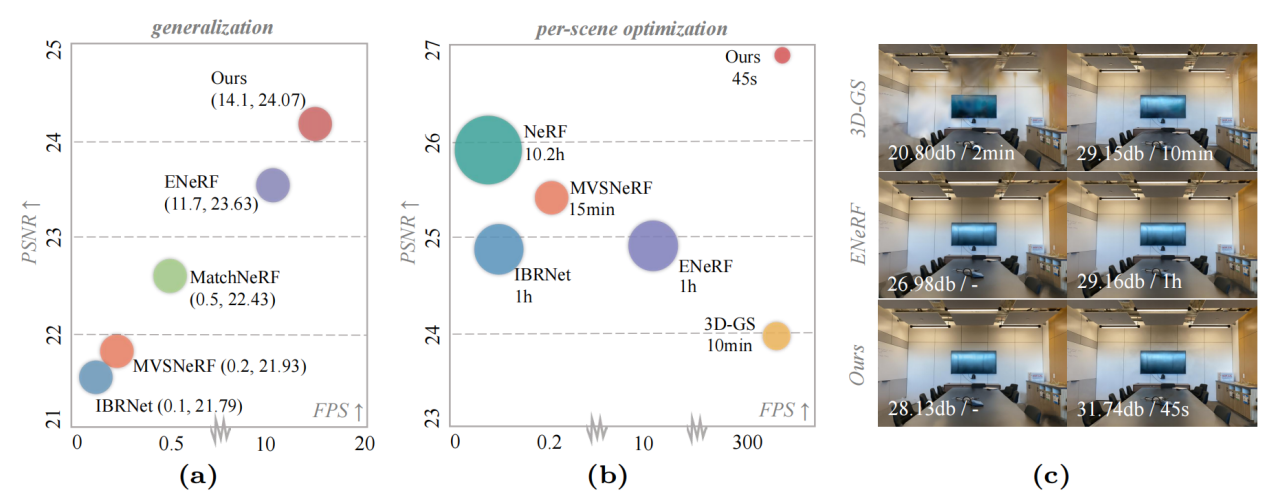
[ECCV 2024] MVSGaussian: Fast Generalizable Gaussian Splatting Reconstruction from Multi-View Stereo
Tianqi Liu, Guangcong Wang, Shoukang Hu, Liao Shen, Xinyi Ye, Yuhang Zang, Zhiguo Cao, Wei Li, Ziwei Liu.
[Project page]
[Paper]
[Code]
[Video]
[中文解读]
MVSGaussian is a Gaussian-based method designed for efficient reconstruction of unseen scenes from sparse views in a single forward pass. It offers high-quality initialization for fast training and real-time rendering.
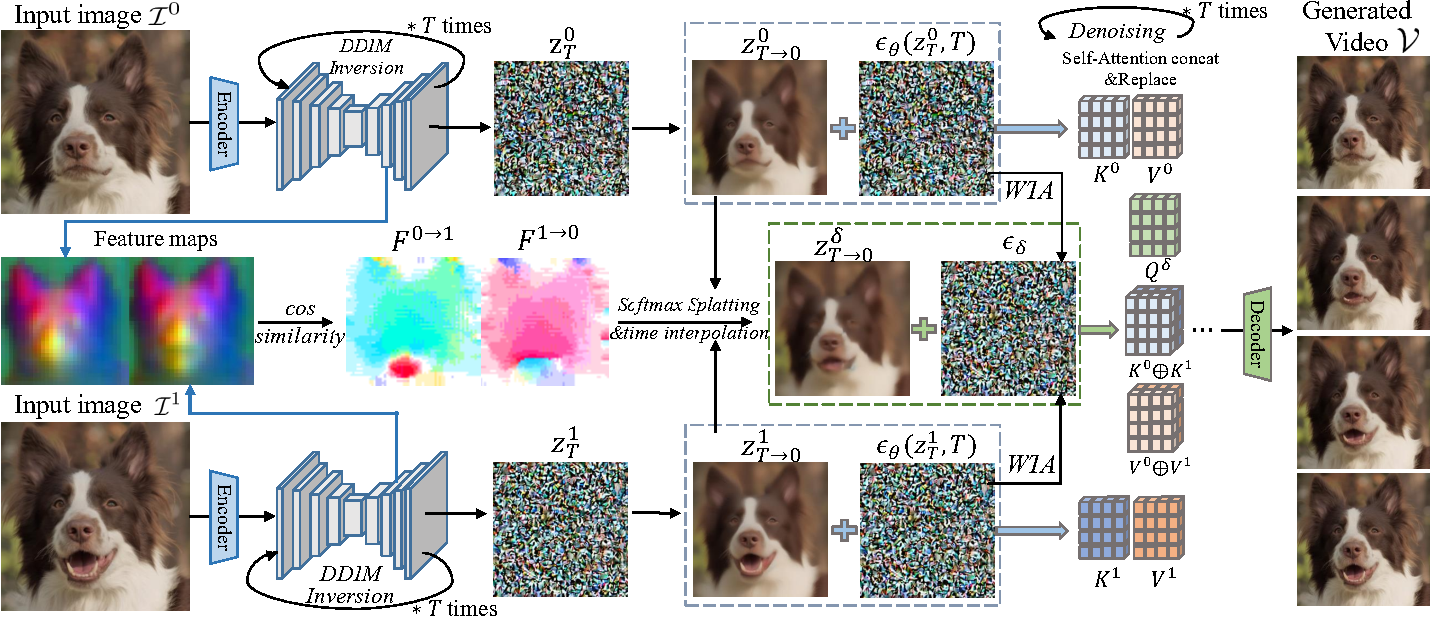
[ECCV 2024] DreamMover: Leveraging the Prior of Diffusion Models for Image Interpolation with Large Motion
Liao Shen, Tianqi Liu, Huiqiang Sun, Xinyi Ye, Baopu Li, Jianming Zhang, Zhiguo Cao.
[Project page]
[Paper]
[Code]
By leveraging the prior of diffusion models, DreamMover can generate intermediate images from image pairs with large motion while maintaining semantic consistency.
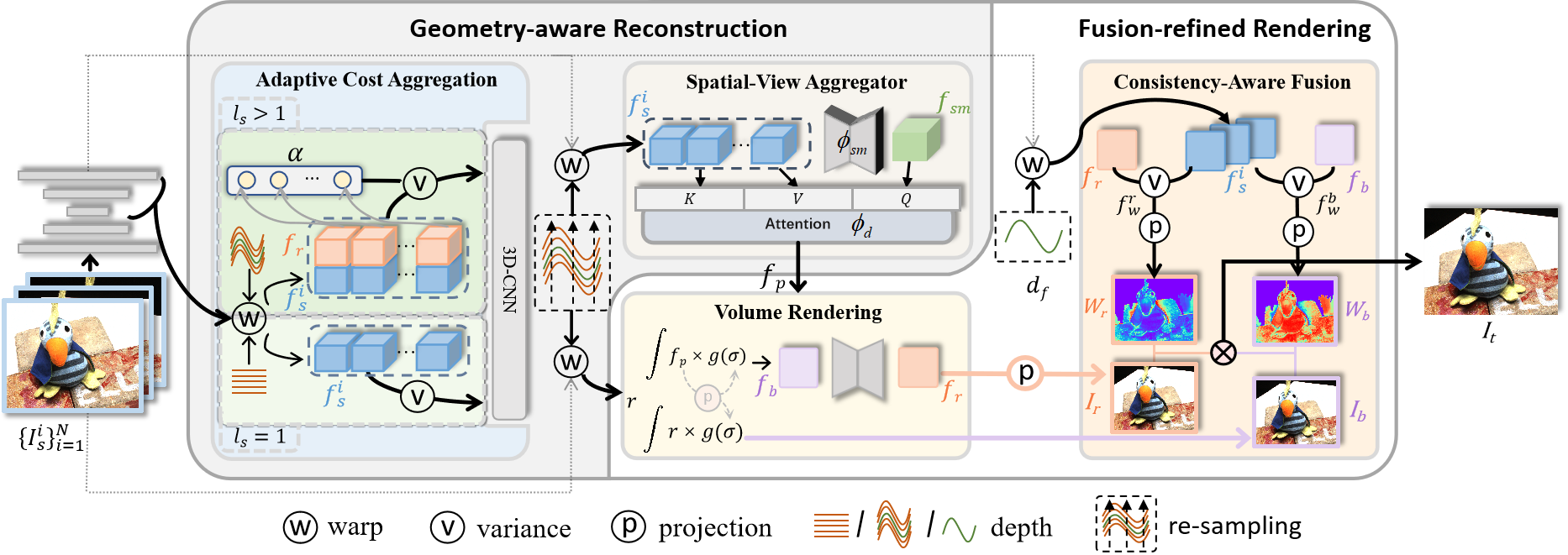
[CVPR 2024] Geometry-aware Reconstruction and Fusion-refined Rendering for Generalizable Neural Radiance Fields
Tianqi Liu, Xinyi Ye, Min Shi, Zihao Huang, Zhiyu Pan, Zhan Peng, Zhiguo Cao.
[Project page]
[Paper]
[Code]
[Video]
We present GeFu, a generalizable NeRF method that synthesizes novel views from multi-view images in a single forward pass.
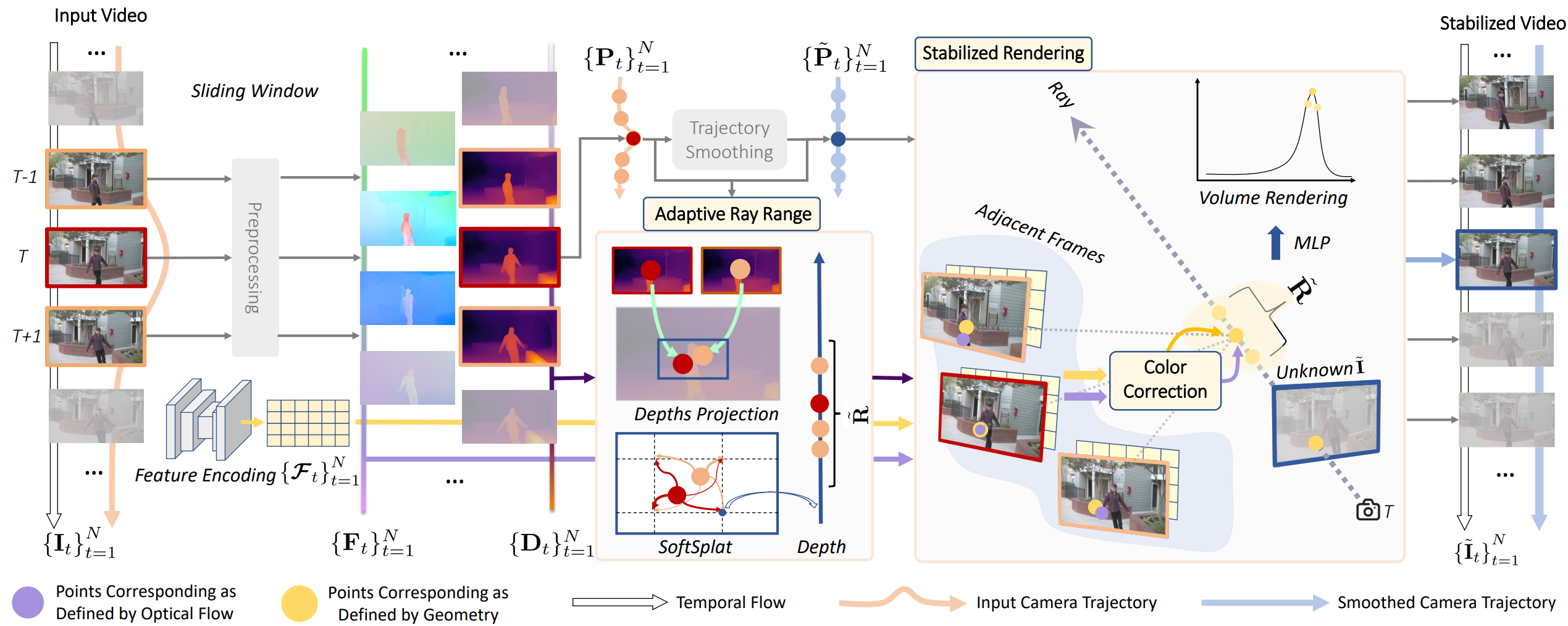
[CVPR 2024] 3D Multi-frame Fusion for Video Stabilization
Zhan Peng, Xinyi Ye, Weiyue Zhao, Tianqi Liu, Huiqiang Sun, Baopu Li, Zhiguo Cao.
[Paper]
[Code]
RStab is a novel framework for video stabilization that integrates 3D multi-frame fusion through volume rendering.
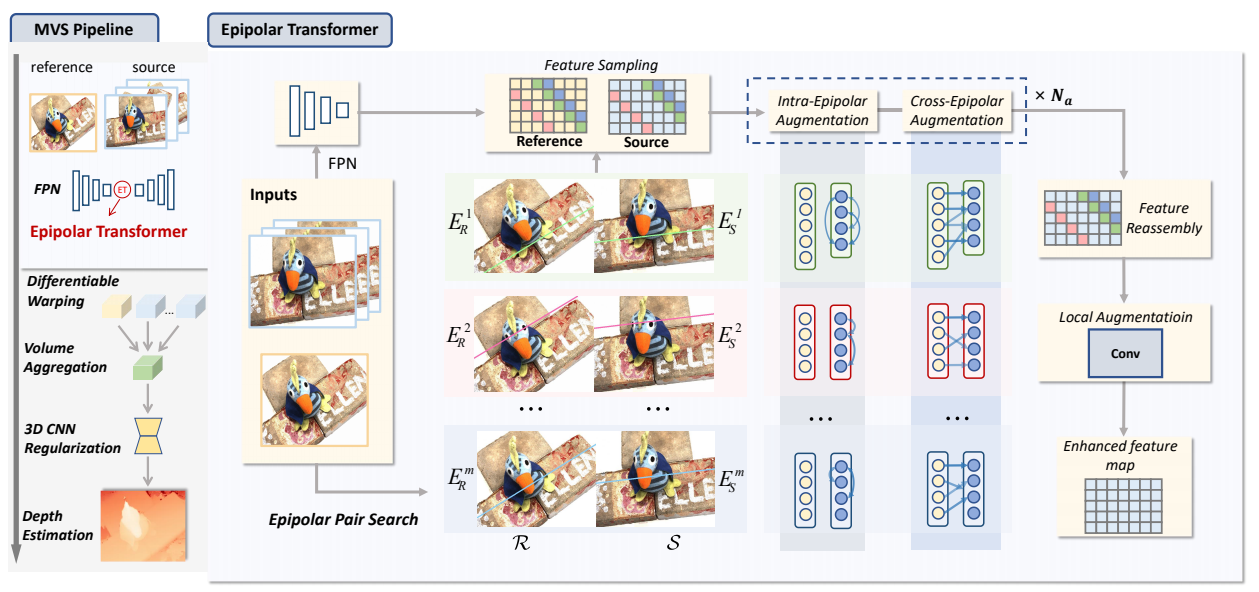
[ICCV 2023] When Epipolar Constraint Meets Non-local Operators in Multi-View Stereo
Tianqi Liu, Xinyi Ye, Weiyue Zhao, Zhiyu Pan, Min Shi, Zhiguo Cao.
[Paper]
[Code]
ETMVSNet uses epipolar geometric priors to constrain feature aggregation fileds, thereby efficiently inferring multi-view depths and reconstructing scenes.
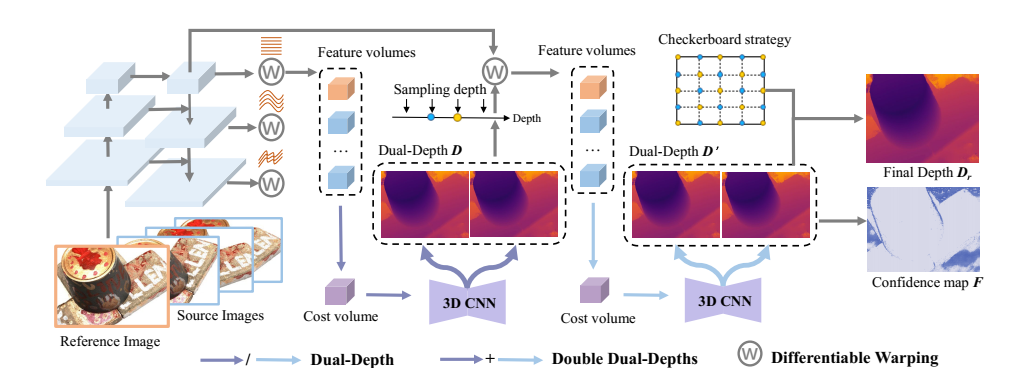
[ICCV 2023] Constraining Depth Map Geometry for Multi-View Stereo: A Dual-Depth Approach with Saddle-shaped Depth Cells
Xinyi Ye, Weiyue Zhao, Tianqi Liu, Zihao Huang, Zhiguo Cao, Xin Li.
[Paper]
[Code]
DMVSNet proposes a new perspective to consider the depth geometry of multi-view stereo and introduces a dual-depth approach to approximate the depth geometry with saddle-shaped cells.
🎖 Honors and Awards
- 2025 National Scholarship (Top 2%)
- 2024 National Scholarship (Top 2%)
- 2023 Honours Degrees (Top 3%)
- 2022 National Scholarship (Top 2%)
- 2022 Merit Student (Top 2%)
- 2021 Outstanding Undergraduate Student (Top 2%)
📎 Links
- Personal Pages: https://tqtqliu.github.io (updated recently🔥)
- Google Scholar: https://scholar.google.com/citations?user=mY2Qc7YAAAAJ
- DBLP: https://dblp.org/pid/134/5653-3.html
- ORCID: https://orcid.org/0009-0003-0718-0614
- Twitter: https://x.com/TianqiLiu664
- CV: https://tqtqliu.github.io/assets/pdf/tianqiliu_cv.pdf